Forschung
Abgeschlossen
Laufzeit: 03.2021 bis 03.2024
AMC6 – Airborne Multispectral Camera
- Entwicklung eines multispektralen, stand-alone Kamerasystems mit anpassbaren Schmal- und Breitbandfiltern für den Einsatz in Flugzeugen, Gyrokoptern oder Helikoptern
- Anwendung im Umweltmonitoring, der Waldzustandsüberwachung, dem Precision Farming, der Ertragsschätzung, sowie der Ableitung von Wasserinhaltsstoffen oder mehr
Die Förderung des Projekts (Förderkennzeichen: KK 5252501 ER0) erfolgte im Rahmen des Zentralen Innovationsprogramms Mittelstand (ZIM) durch die AIF Projekt GmbH.
Aktuell:
- Gerät einsatzbereit
- Software in Entwicklung

Methode erfolgreich getestet
Laufzeit: 10.2022 bis 02.2023
Studienarbeit Geo-/Referenzierung von 3D-Unterwasserstrukturen mittels Photogrammetrie durch wissenschaftliche Taucher
- Georeferenzierung von 3D-Unterwasserstrukturen mittels Photogrammetrie
- Entwicklung eines validen Ablaufes für die Anwendung der Photogrammetrie in Unterwasserumgebungen durch wiss. Taucher
- Auswertung, Genauigkeitsbetrachtung und Georeferenzierung der Daten
Aktuell:
- Referenzanwendungen in Entwicklung

Abgeschlossen
Laufzeit: 09.2020 bis 08.2022
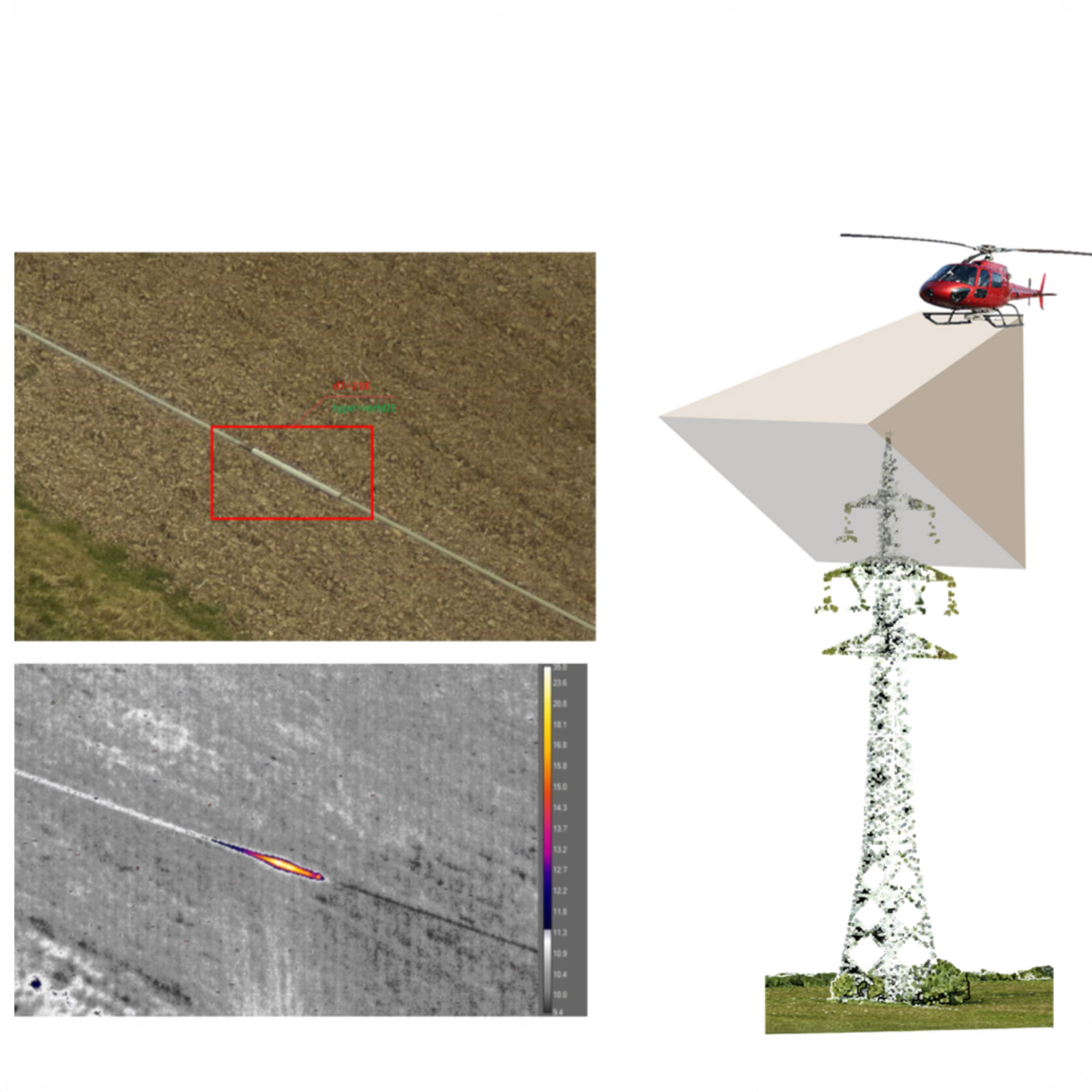
HiSTOS – High-Speed-Thermografie zur Online-Schadensbilderfassung
- Entwicklung eines Thermalmesssystems für den Einsatz durch einen Helikopter zur Schadstellendetektion bei Stromtrassen
- Datenerfassung mittels RGB- und Thermalkamera
- Automatisierte Klassifizierung der Leitungselemente
- Ableitung der Temperatur am Objekt
Aktuell:
- Gerät zuverlässig im Einsatz
Abgeschlossen
Laufzeit: 04.2016 bis 12.2018
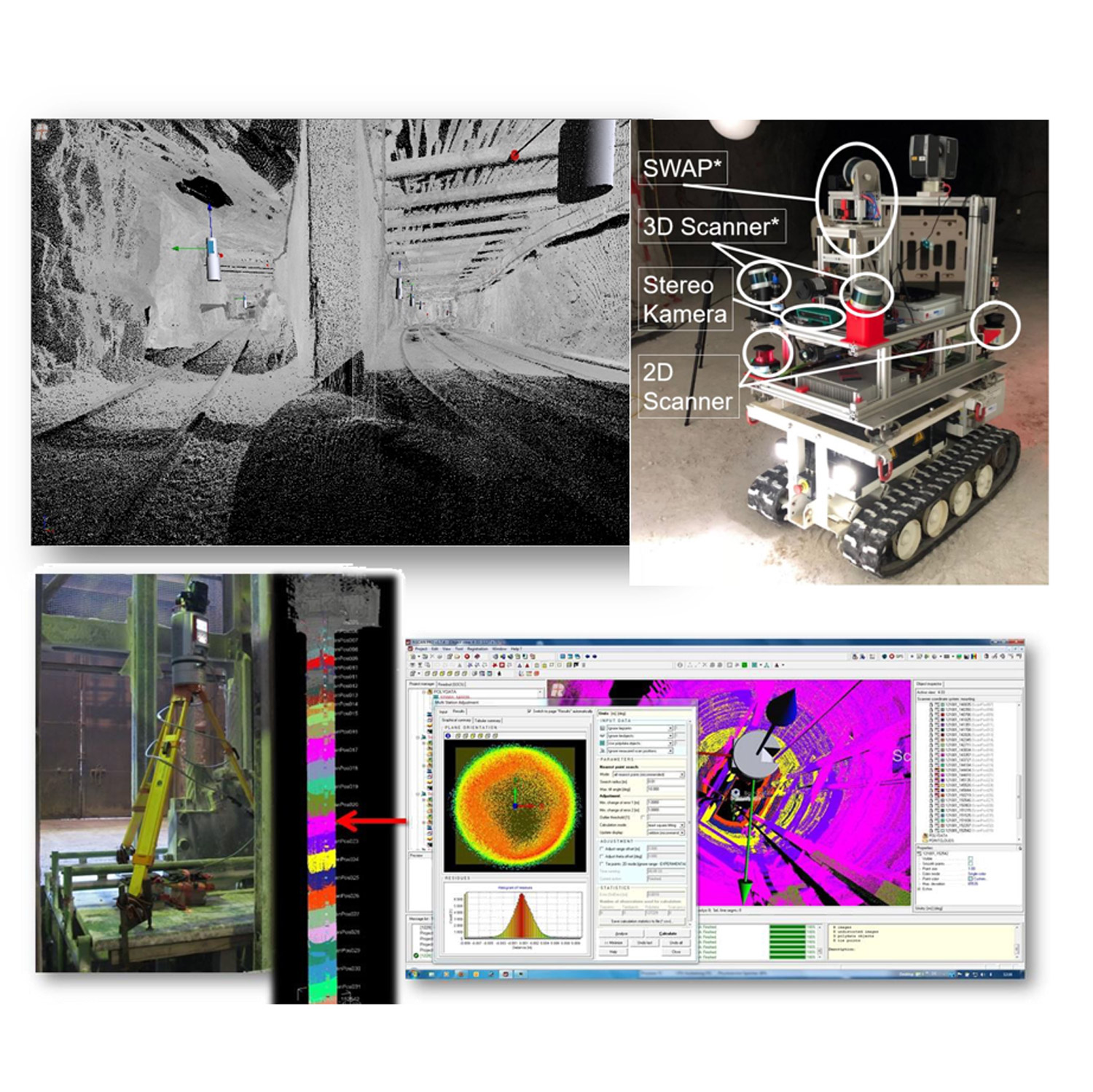
UPNS 4D+ – Untertägiges 4D+ Positionierungs-, Navigations- und Mapping System Untertage
- Autonomer Fahrroboter inklusive Laserscanner und Stereokamera zur Lagerstellenerkundung
- Positionierung und Navigationssystem unter Tage
- Lagerstellenerkundung und Dokumentation
Das Projekt wurde vom BMBF unter dem Förderkennzeichen 033R126D gefördert.
Aktuell:
- Gerät in der Forschung im Einsatz
Abgeschlossen
Laufzeit: 07.2011 bis 12.2013
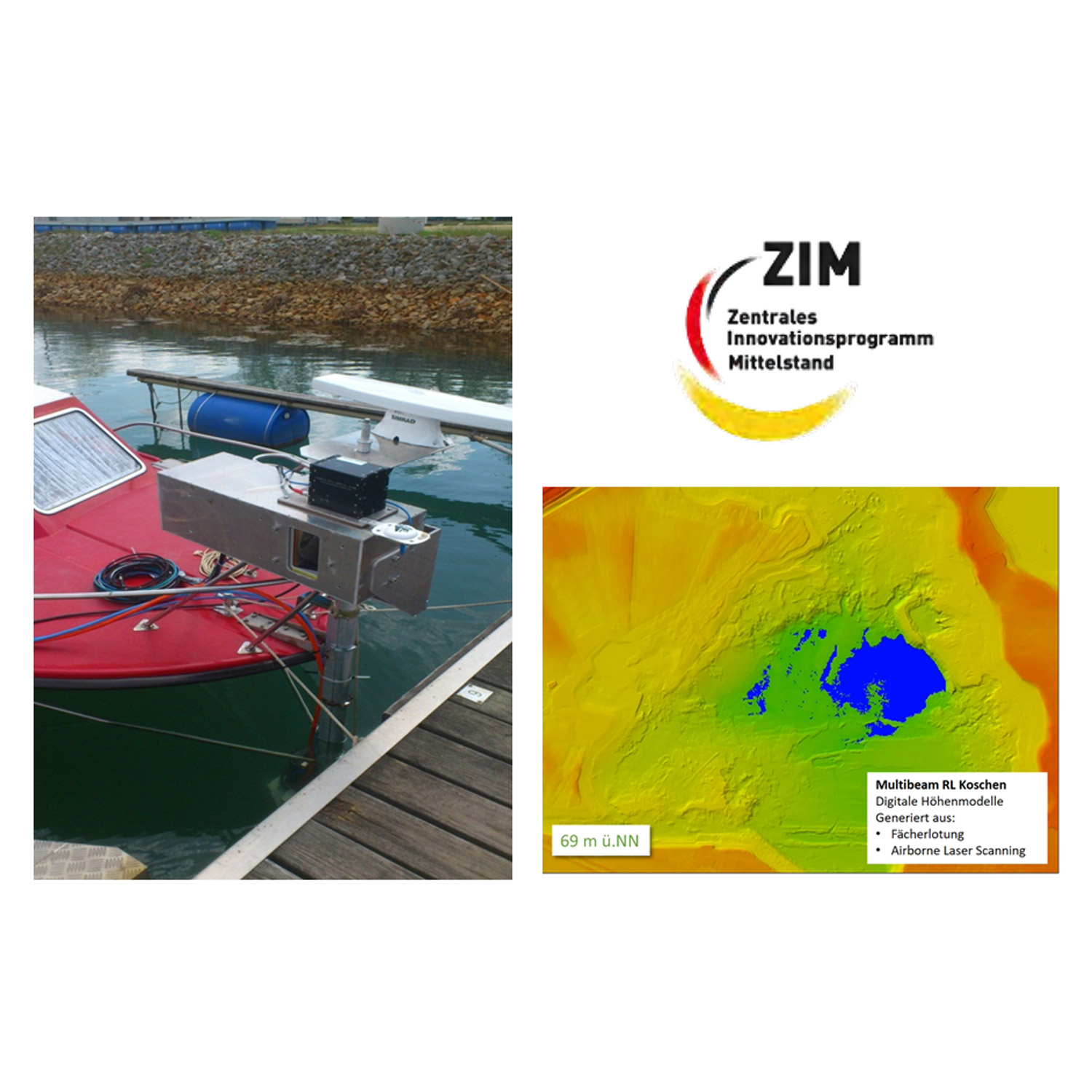
HYFLES – HYbrides Fächerlot- und Laserscanverfahren
- Kombination von Fächerecholot und Laserscanner auf einem Schiff inkl. Positionierungssystem
- Kombination und Kalibrieren der Daten (Softwareentwicklung)
- Bis 5 cm Genauigkeit bei 20 m Aufnahmeabstand
- Erfassung der Gewässerbathymetrie und Integration weiterer Sensordaten
Die Kombination von Fächerecholot und Laserscanning hat sich als effektiv erwiesen, ist jedoch für das mobile Echtzeitmonitoring zu kostspielig und nicht rentabel. Hier ergeben sich alternative Anwendungsmöglichkeiten.
Aktuell:
- Einsatz aktuell nicht weiterverfolgt